
Servo Drive SD700-1R8A-PA VEICHI - SD700 Series
3.564.000đ
Sản phẩm
Không có sản phẩm nào phù hợp!
Hệ thống chi nhánh
Trụ sở chính
Tầng 3, tòa nhà HH01, 87 Lĩnh Nam, phường Vĩnh Tuy, Hà Nội
Văn Phòng Thái Hà
Số 33A, Ngõ 41 phố Thái Hà, phường Đống Đa, Hà Nội
Chi nhánh Hồ Chí Minh
55 Minh Phụng, phường Đông Hưng Thuận (Quận 12 cũ)
Chi nhánh Hải Phòng
Số 23, BS1 Khu Đô thị PG, phường An Hải, Hải Phòng
Chi nhánh Đà Nẵng
35 Chu Mạnh Trinh, phường Cẩm Lệ, Đà Nẵng
Xưởng sản xuất
Số 20, Ngõ 64 Sài Đồng, phường Phúc Lợi, Hà Nội
Trung tâm Bảo hành Ecovacs
Toà D CC Báo Nhân Dân, phường Xuân Phương, Hà Nội
Aqara Smart Home
198 Ngọc Trai 6, Vinhomes Ocean Park, xã Gia Lâm, Hà Nội
National Distribution Center 1
Thôn Lập Thành, xã Yên Xuân, Hà Nội
National Distribution Center 2
KCN Yên Mỹ 1, xã Yên Mỹ, Hưng Yên
National Distribution Center 3
16/16 Tân Thới Nhất 8, phường Đông Hưng Thuận, Hồ Chí Minh
Region Distribution Center 1
186 phố Sài Đồng, phường Phúc Lợi, Hà Nội
Region Distribution Center 2
45 Vũ Viết Sào, phường An Hải, Hải Phòng
Region Distribution Center 3
Kho Bình Vinh, Đường số 1, KCN Hòa Cầm, phường Cẩm Lệ, Đà Nẵng
Region Distribution Center 4
Km 330+445, đường tránh TP, phường Quảng Phú, Thanh Hóa
Bộ lọc
5.650.150đ

5.812.400đ
5.975.200đ
6.644.000đ
6.772.700đ

7.403.220đ
7.437.100đ
7.437.100đ

7.635.100đ
8.061.900đ
8.157.600đ
8.438.650đ
1
của 154Driver servo là một trong những bộ phận không thể thiếu trong hệ thống servo. Hệ thống này được thiết kế với nhiều các tính năng nổi bật như: hiệu suất cao, điều chỉnh chính xác,... nên được ưa chuộng lựa chọn sử dụng. Vậy để hiểu rõ hơn về driver servo, cùng Hợp Long tìm hiểu ngay qua bài viết dưới đây!
Driver servo là bộ điều khiển, một phần quan trọng không thể thiếu trong hệ thống servo có nhiệm vụ chính nhận tín hiệu điều khiển từ PLC, điều khiển truyền lệnh đến động cơ và điều khiển động cơ servo hoạt động. Đồng thời, sẽ nhận tín hiệu phản hồi liên tục về vị trí và tốc độ hiện tại của động cơ servo từ encoder.
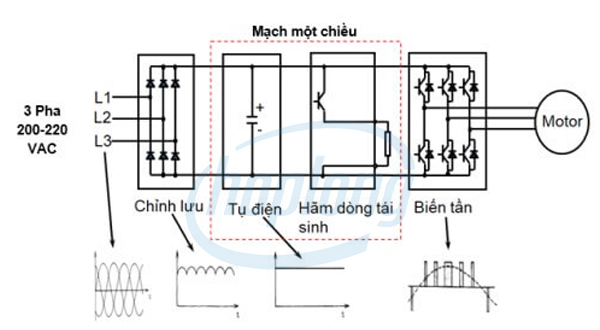
Bộ phận cấu tạo của driver servo được thiết kế gồm 4 bộ phận chính như sau:
- Bộ chỉnh lưu
- Mạch một chiều
- Bộ nghịch lưu
- Mạch điều khiển

- Bộ điều khiển sẽ tính toán để xung phá PMW cho động cơ hoạt động khi nhận được xung điều khiển. Trong quá trình chạy, vị trí và tốc độ được phản hồi liên tục về bộ điều khiển thông qua encoder
- Bộ điều khiển sẽ dựa vào các tín hiệu để gửi về và so sánh tính toán độ lệch tiếp tục điều khiển xung xuất ra giúp động cơ sẽ đạt được vị trí mong muốn với tốc độ đặt
- Cảm biến dòng sẽ phản hồi dòng điện tiêu thụ trên động cơ để có những tính toán được tải thực tế và hiệu chỉnh dòng ra cho phù hợp với giá trị lắp đặt
Kết nối dòng điều khiển bằng mạng truyền thông SSCNET

Kết nối dòng điều khiển bằng phát xung

Đấu nối chung


Website cùng công ty
Copyright © 2024 hoplongtech.com All rights reserved. Mã số thuế: 0104509916 do Sở Kế Hoạch & Đầu Tư Hà Nội cấp lần đầu ngày 14/10/2010